WeiLin
End of Best.
vlog_day16:有限状态机
by WeiLin
FSM有限状态机分为Moore(摩尔型)和Mealy(米里型)两类:(1)Moore :输出只取决于当前状态,与输入没有关系;(2)Mealy :输出既取决于当前状态,又取决于输入;
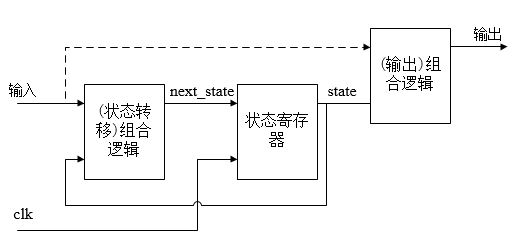
状态机如上图所示,可以分为3个部分:
(1)状态转移组合逻辑 : 由当前状态(state)计算下一状态(next_state);
(2)状态寄存器:保存state,每个时钟会将next_state更新到寄存器中;
(3)输出组合逻辑:由(输入)和当前状态计算输出;
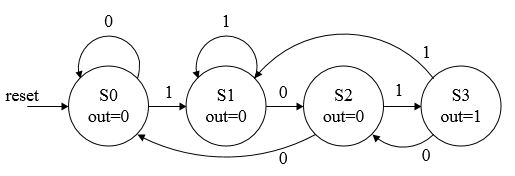
FSM有3种写法:一段式、两段式、三段式,下面以101序列检测器为例来展示不同的写法。首先画出101序列检测器的泡泡图:
一段式是将状态转移逻辑、输出逻辑和状态更新包含在一个always时序块里。对于简单的状态机,一段式便于理解,但对于较为复杂的FSM就不适用了。
//101序列检测器:一段式
module seq101(
input clk,rst,in,
output reg out
);
localparam S0=2'b00,S1=2'b01,S2=2'b10,S3=2'b11;
reg [1:0] state;
always@(posedge clk or posedge rst)begin
if(rst)begin
out<=0;
state<=S0;
end
else begin
case(state)
S0:begin
state<=in?S1:S0;
out<=0;
end
S1:begin
state<=in?S1:S2;
out<=0;
end
S2:begin
state<=in?S3:S0;
out<=0;
end
S3:begin
state<=in?S1:S2;
out<=1;
end
endcase
end
end
endmodule
而两段式是用一个时序always块描述状态更新,一个组合always块描述状态转移逻辑、输出逻辑。两段式中输出是来自组合逻辑的,会有毛刺。
//101序列检测器:两段式
module seq101_2(
input clk,rst,in,
output reg out
);
localparam S0=2'b00,S1=2'b01,S2=2'b10,S3=2'b11;
reg [1:0] state,next_state;
always@(posedge clk or posedge rst)begin
if(rst)
state<=S0;
else
state<=next_state;
end
always@(*)begin
case(state)
S0:begin
next_state<=in?S1:S0;
out<=0;
end
S1:begin
next_state<=in?S1:S2;
out<=0;
end
S2:begin
next_state<=in?S3:S0;
out<=0;
end
S3:begin
next_state<=in?S1:S2;
out<=1;
end
endcase
end
endmodule
一般而言,应该使用三段式,将状态转移逻辑、输出逻辑和状态更新分别用一个always块描述。而且这种描述方法符合状态机的结构划分。需要注意的是输出需要取自触发器,而不是组合逻辑,否则会产生毛刺。
//101序列检测器:三段式
module seq101_3(
input clk,rst,in,
output reg out
);
localparam S0=2'b00,S1=2'b01,S2=2'b10,S3=2'b11;
reg [1:0] state,next_state;
always@(*)begin
case(state)
S0:next_state<=in?S1:S0;
S1:next_state<=in?S1:S2;
S2:next_state<=in?S3:S0;
S3:next_state<=in?S1:S2;
default:next_state<=S0;
endcase
end
always@(posedge clk or posedge rst)begin
if(rst)
state<=S0;
else
state<=next_state;
end
always@(posedge clk or posedge rst)begin
if(rst)
out<=0;
else begin
case(state)
S0:out<=0;
S1:out<=0;
S2:out<=0;
S3:out<=1;
default:out<=0;
endcase
end
end
endmodule